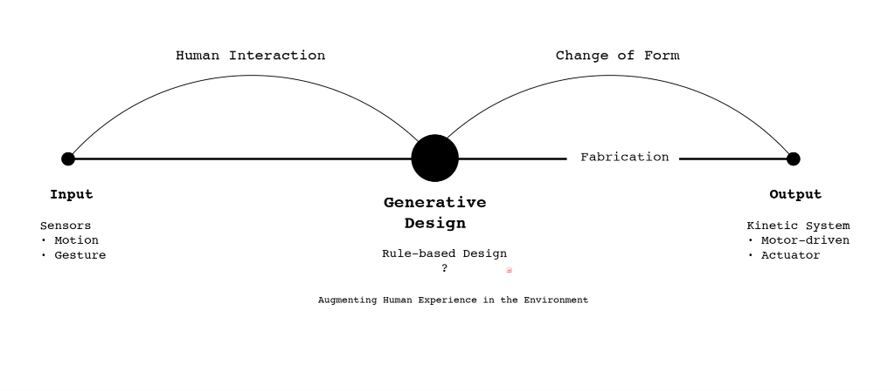
In contemporary architecture, kinetic systems such as facades are predominantly designed to operate autonomously, responding to predetermined schedules or environmental sensors. However, this often overlooks the potential for direct engagement with building occupants. Our project aims to redefine this paradigm by integrating occupant interaction into architectural kinetic assemblies, thus fostering dynamic user experiences within built environments.
Research Question
How can we augment the human experience when interacting with kinetic environments?